Tunnel Exploration
Exploring the inside of a tunnel and creating a 3D map are quite impossible tasks for human as the unknown environment can be hazardous or live threatening. Sensors and advanced algorithms based autonomous robots can easily navigate through the intricate and unexplored tunnel networks, gather data to generate the detailed three-dimensional maps. These maps are useful tool in various applications such as disaster response, mining operations, and infrastructure assessment. Here, two groundbreaking frameworks are proposed for robotic tunnel exploration and 3D map creation:
The ”Exploration-RRT” framework developed by Lindqvist et al.[6]
The ”Explore Locally, Plan Globally” framework introduced by Dang et al.[1]
These frameworks handle the challenges related to path planning, exploration efficiency, and map generation in subterranean environments.
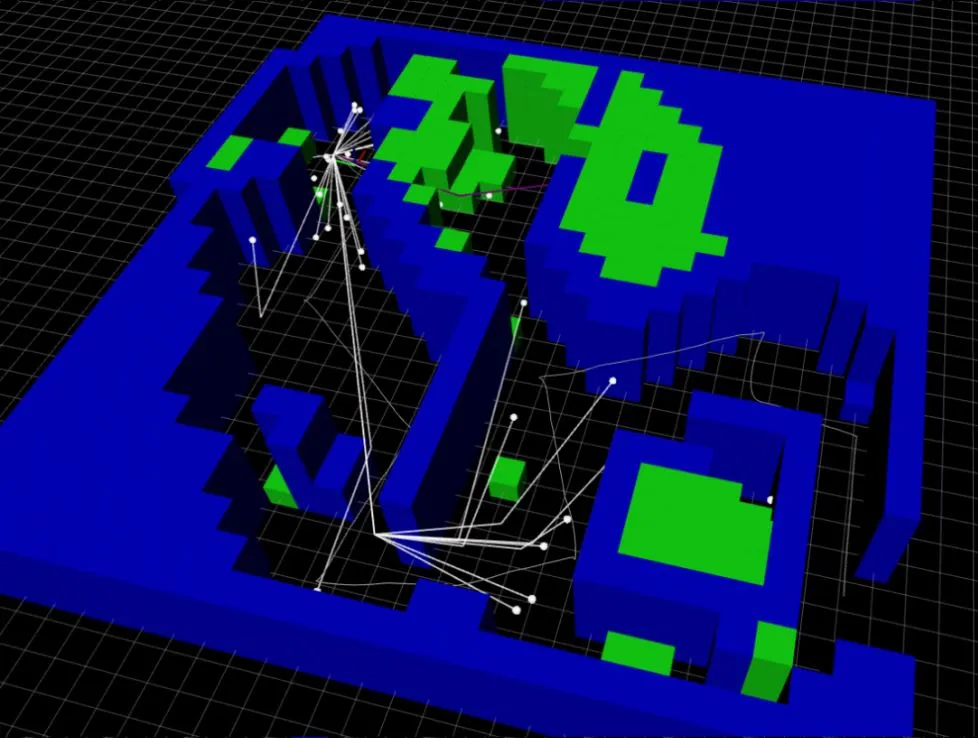
The Rapidly-exploring Random Tree (RRT) algorithm is the basement of the “Exploration-RRT” framework which is essential tool for path planning in robotics. The uniqueness of this framework lies in its extension to incorporate multi-objective optimization principles including exploration efficiency, obstacle avoidance, and path length minimization while the original RRT algorithm focuses on finding feasible path.
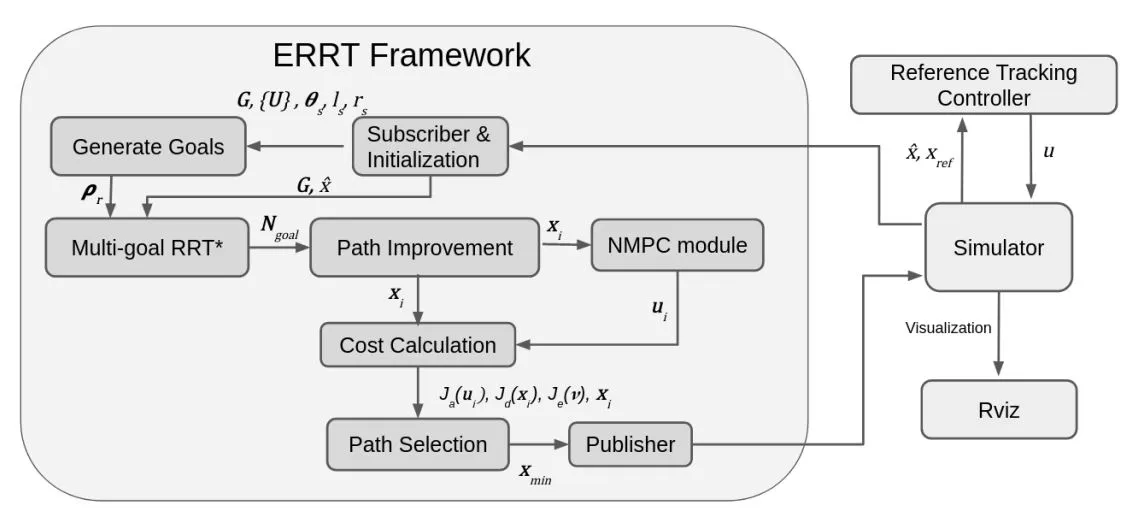
The core methodology of the Exploration-RRT framework involves integrating customized cost functions to encapsulate the objectives of exploration and obstacle avoidance, while still ensuring that the generated paths remain efficient. This algorithm guide the tree expansion process by assigning suitable weights to each objective and generates paths that are a compromise between exploration of uncharted regions, avoiding collisions with obstacles, and maintaining an efficient path length. This multi-objective approach is suitable for a variety of subterranean environments which ensures the robot’s trajectory is well-balanced.
Framework Overview
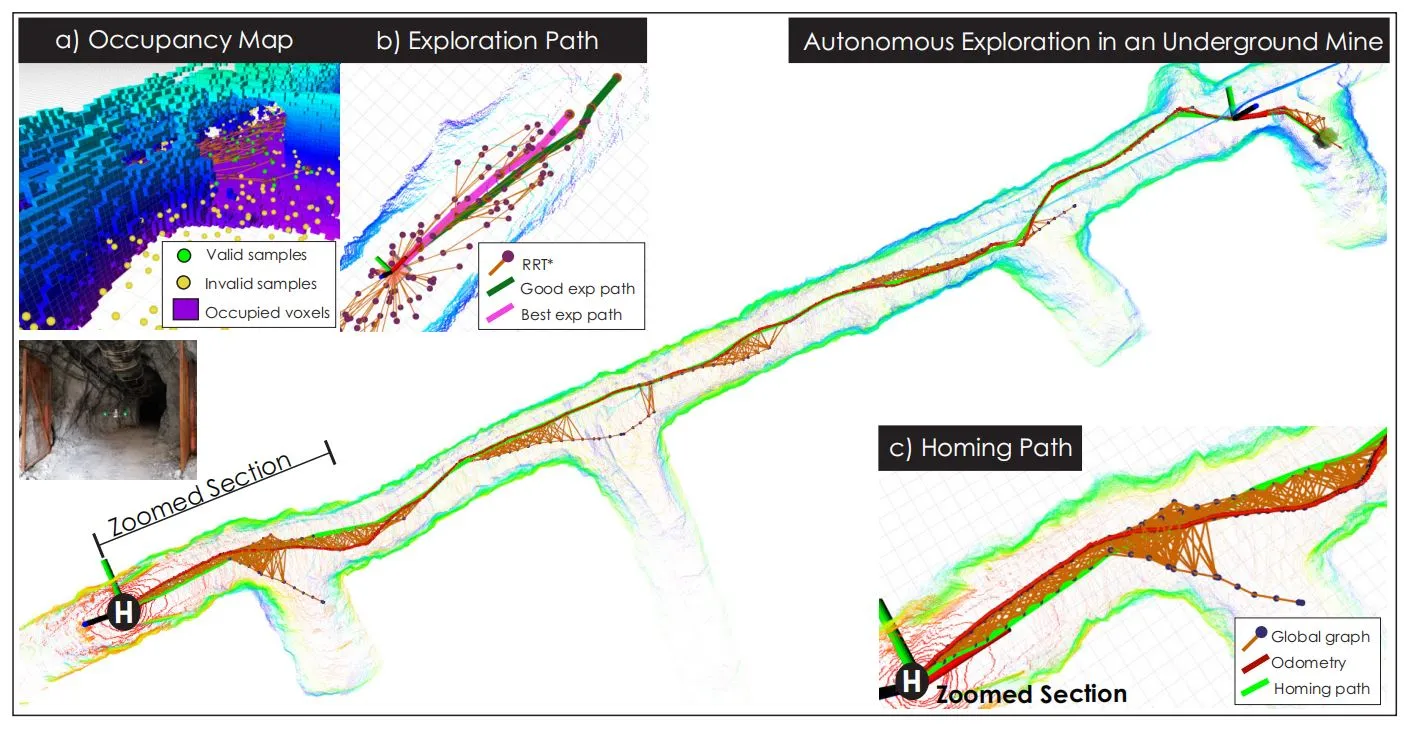
The ”Explore Locally, Plan Globally” framework, proposed by Dang et al. [1], introduces a holistic approach to robotic tunnel exploration that advocates the integration of local perception techniques with global path planning strategies. The advantages of local mapping to inform high-level, global path planning decisions, leading to more effective exploration are the core of this framework.
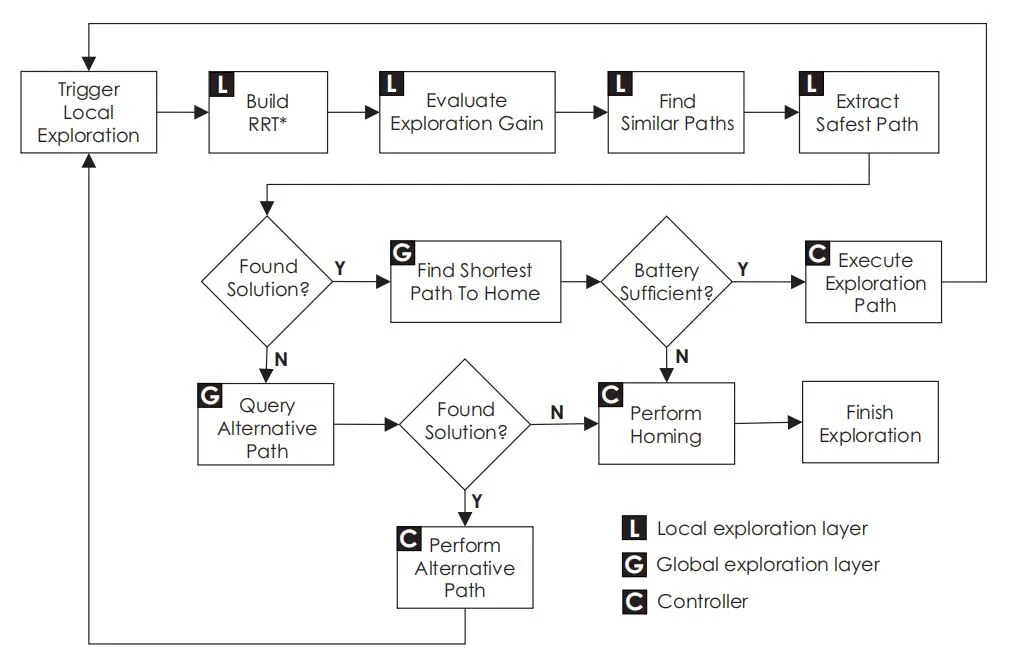
The methodology uses the sensors such as LiDAR and cameras to capture data about the robot’s immediate surroundings and then processed the data using techniques like Simultaneous Localization and Mapping(SLAM) to generate a local map of the environment. The local map serves as a foundational piece of information for subsequent high-level path planning where global path planning algorithms utilize the local map to formulate paths that align with exploration objectives considering the broader context of the environment. This integrated approach ensures that the robot’s actions are not only guided by its immediate surroundings but also take into account the overall goals of exploration.
Despite in advance robotic tunnel exploration and 3D map creation, both of the frameworks have shown remarkable potential, there are several challenges that merit attention for further development. Tunnel environments can vary significantly in terms of layout, dimensions, obstacles, and structural characteristics where the frameworks face challenge to adapt to the diverse tunnel geometries and conditions.
Experimental Setup
To comprehensively evaluate the proposed frameworks, both Lindqvist et al.[6] and Dang et al.[1] employed sophisticated experimental setups that closely mimic real-world tunnel exploration scenarios. The experiments were conducted in both simulation environments and actual tunnel networks to capture a wide range of challenges and complexities that may arise during exploration.
The simulation environment allowed researchers to systematically evaluate the performance of the frameworks across different tunnel layouts, obstacle distributions, and exploration objectives. This controlled environment facilitated the fine-tuning of framework parameters and the assessment of their adaptability to various scenarios.
In real-world experiments, physical robots equipped with the necessary sensors and computational hardware were deployed in actual tunnel networks. These experiments provided valuable insights into the frameworks’ capabilities in handling the complexities and uncertainties inherent in real-world environments. They also validated the frameworks’ practical applicability and potential for deployment in field operations.
Comparative Performance Evaluation
The performance evaluation of the “Exploration-RRT” and “Explore Locally, Plan Globally” frameworks is crucial for understanding their strengths and limitations. Lindqvist et al.[6] conducted extensive simulations and real-world experiments to assess the Exploration-RRT framework’s ability to balance exploration efficiency, obstacle avoidance, and path length. The results showcased the framework’s adaptability across different environments and objectives. Furthermore, the framework’s capability to generate informative maps was demonstrated through the integration of sensory data into a coherent global map.
Similarly, Dang et al.[1] provided an in-depth performance evaluation of the “Explore Locally, Plan Globally” framework. Through a series of simulations and field experiments, the framework’s efficacy in combining local perception and global planning was highlighted. The results emphasized how the framework’s utilization of local mapping improved the quality of global path planning decisions, leading to more effective exploration and comprehensive map generation.
Case Studies and Experimental Results
To validate the effectiveness of the proposed frameworks, both “Exploration-RRT” and “Explore Locally, Plan Globally” have been subjected to rigorous testing in various scenarios, both simulated and real-world. The “Exploration-RRT” framework, as detailed by Lindqvist et al.[6], has demonstrated its capabilities in navigating complex tunnel layouts while maintaining a balance between exploration, obstacle avoidance, and path efficiency. The algorithm’s ability to adapt to different environments and objectives positions it as a valuable tool for subterranean exploration.
In the case of the “Explore Locally, Plan Globally” framework, Dang et al[1]. presented compelling results highlighting the advantages of their approach. By focusing on local mapping and integrating it with global planning, the framework showcased superior performance in terms of exploration coverage and efficiency. This integrated strategy is particularly effective in scenarios where the environment’s complexity demands a careful balance between local awareness and global context.