Mobile Manipulation Platform Husky¶


This package supplies Sphinx-based tutorial content to assist you with setting up and using MBS Husky-xARM6-Robotiq robot. The tutorials topics are listed in the left column, and are presented in the suggested reading order.
Attention
These tutorials assume that you are comfortable working with ROS. We recommend starting with ros2 tutorials. if you are not familiar with ROS already.
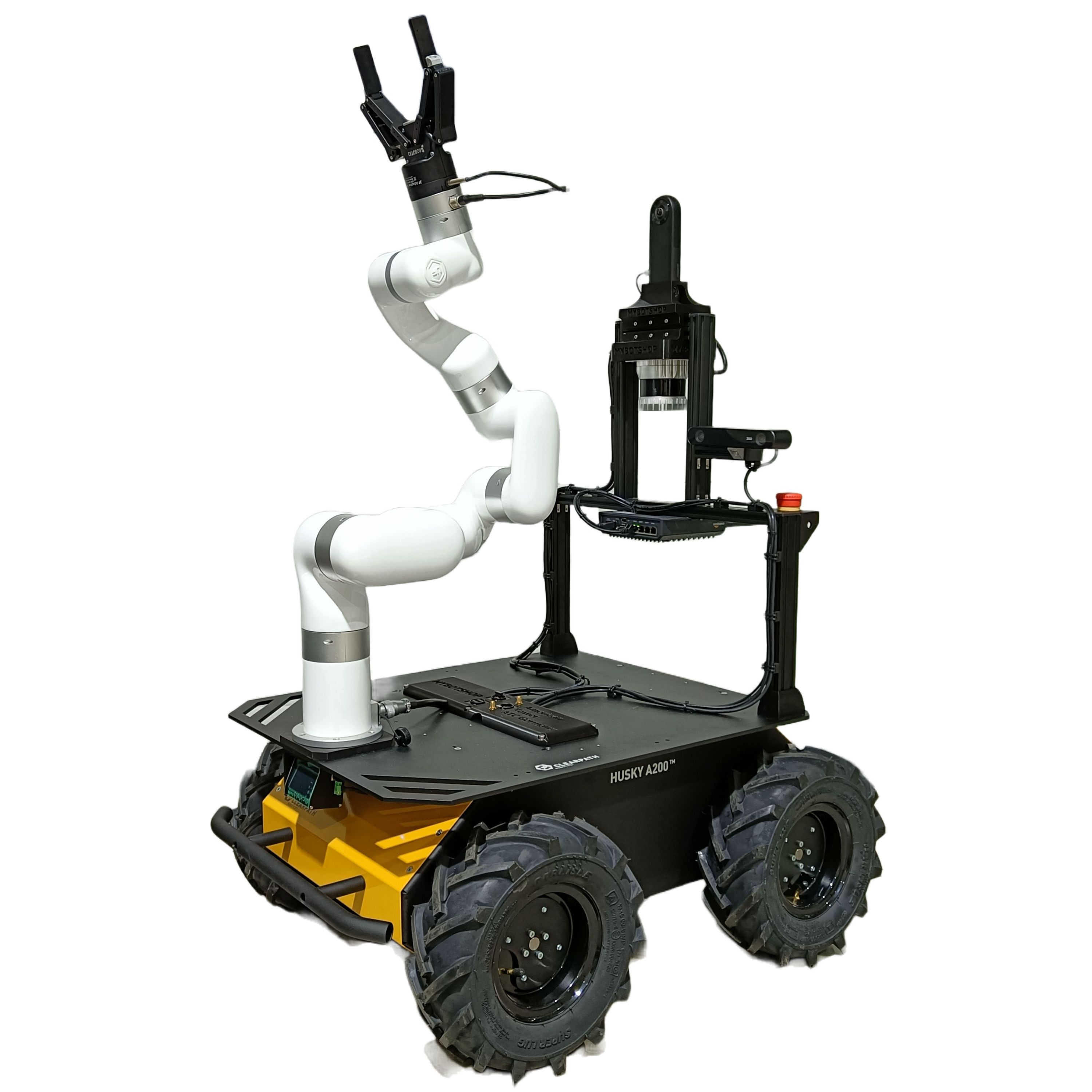
Clearpath Husky¶
Welcome to the Clearpath Husky Mobile Manipulation Platform hub, your gateway to exploring a range of innovative projects and configurations built on the robust
and versatile Clearpath Husky platform. The Clearpath Husky serves as a reliable foundation for diverse research and development endeavors, offering rugged
all-terrain mobility, precise control, and customizable capabilities. The Husky is shipped in a medium wooden crate, ensuring safe transportation.
At MyBotShop GmbH, we go the extra mile by providing the Husky with pre-installed and configured base software packages, including motor drivers and IMU sensors,
in the Husky’s ros2_ws.
From autonomous navigation and environmental sensing to manipulation and interaction, the Husky platform empowers researchers and developers to tackle a wide array of challenges in robotics. Explore the projects below to discover how the Husky is being utilized in various domains, from academic research and industrial automation to field applications and beyond.